
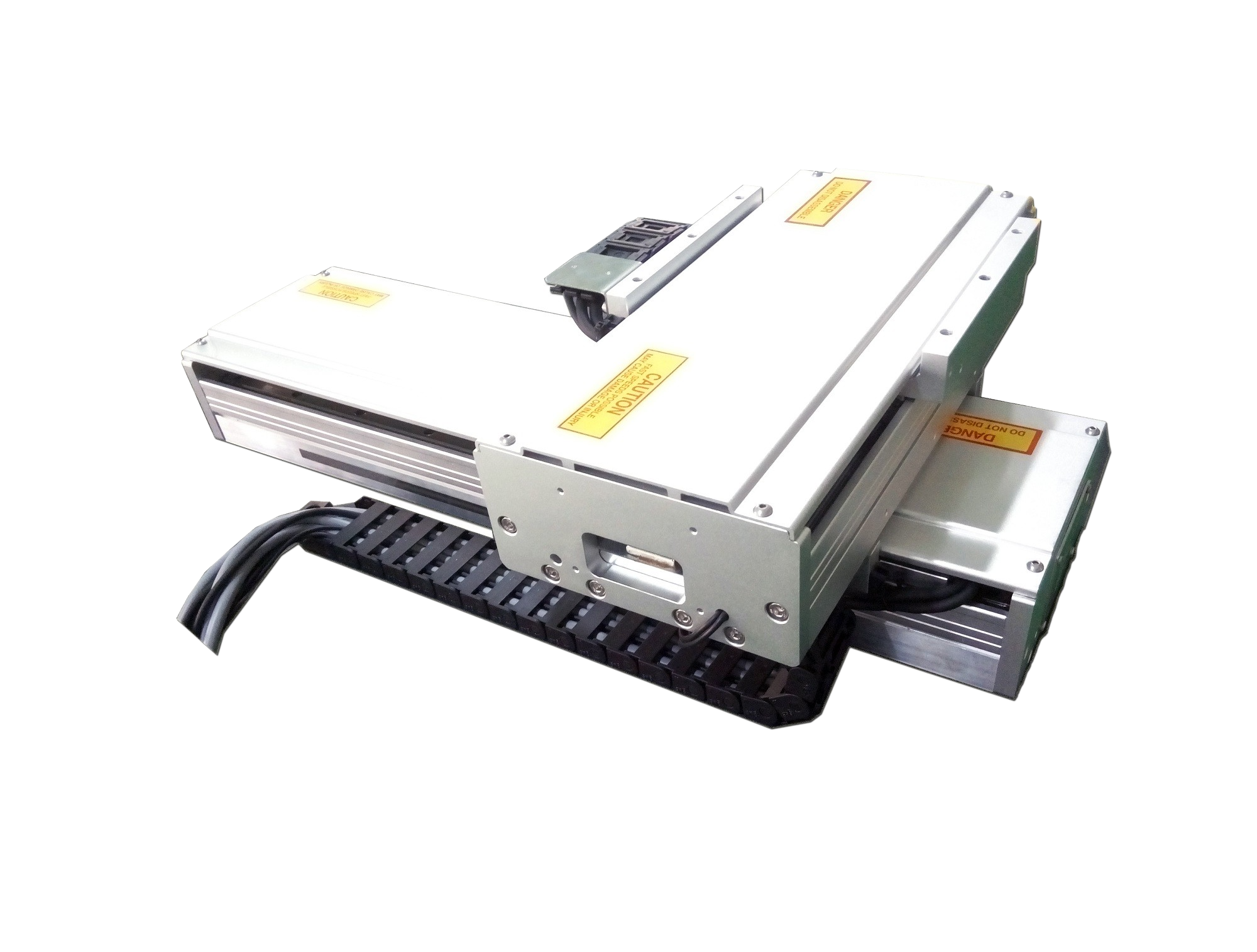

直線模組搭配伺服電機驅動,是自動化高精度傳動主流方案,搭配流程清晰、接線調試簡單,做好選型對接、機械裝配、電氣接線與參數調試,即可實現精準啟停、勻速運行與定點定位。
一、功率扭矩合理選型
依據模組負載、運行速度、推力大小確定伺服功率。輕載短行程選用小功率伺服,重載長行程選用大功率機型;同時匹配輸出扭矩,預留充足過載余量,保證推拉負載輕松帶動,避免低速無力、高速過載報警。
二、確定傳動連接方式
常用兩種對接形式,直連式結構緊湊、傳動效率高,電機直接對接模組輸入端;減速一體式加裝行星減速機,放大輸出扭矩,適配大推力低速工位。統一確認電機法蘭、軸徑、鍵槽尺寸,保證無縫對接無偏差。
三、機械裝配精準對中
固定好直線模組水平位置,將伺服電機平穩安裝在電機座上,鎖緊固定螺絲。精細校正電機輸出軸與絲桿輸入端同軸度,避免偏心安裝,減少運行振動、異響與油封磨損,聯軸器松緊適度,不可過緊頂死。
四、線路規范對接布線
分別連接伺服動力線與編碼器信號線,嚴格區分正負極與相序。控制端接入運動控制器或PLC脈沖信號、方向信號,屏蔽線做好接地處理,遠離強電線路,防止信號干擾造成走位錯亂、丟脈沖現象。
五、設定基礎運行參數
先恢復伺服出廠參數,匹配控制脈沖模式,設定脈沖指令類型。按照模組絲桿導程計算脈沖當量,精準設置電子齒輪比,讓指令距離與實際行走距離保持一致,從根源消除行走距離誤差。
六、調試運動運行模式
低速空載試運行,觀察模組行走是否順暢無卡頓,正反轉向是否正常。依次調試點動運行、寸動走位、連續勻速運行,逐步加快運行速度,測試啟停平穩性,杜絕急停急轉沖擊傳動結構。
七、精度補償優化校準
試運行完成后進行誤差校準,錄入絲桿螺距補償、回程間隙補償數據,修正機械裝配產生的微小偏差。多次往復定點測試,微調伺服增益、加減速時間,提升響應速度與重復定位精度。
八、日常運行注意事項
搭配完成后保持模組內部充足潤滑,定期檢查電機運行溫升與線路緊固狀態。合理設定行程限位,避免超程撞擊損壞絲桿與滑塊,長期穩定保障伺服驅動模組高精度、高效率持續運轉。
